
Zwischen Dehnung und Signal
Einordnung von Brückenkonfigurationen mit Dehnmessstreifen
Kundenspezifische Sensorlösungen für hochgenaue Kraft- und Dehnungsmessungen an Maschinen, Anlagen und tragenden Strukturen - robust, integrierbar und industrietauglich.
1 Einleitung
Dehnmessstreifen (DMS) sind etablierte Sensorelemente zur elektrischen Erfassung mechanischer Beanspruchungen. Sie messen keine Kraft direkt, sondern die lokale Dehnung eines Bauteils. Unter Verwendung geeigneter mechanischer Modelle lassen sich aus der Dehnung unter anderem Kraft, Biegemoment, Druck und Drehmoment ableiten. Damit bilden DMS eine zentrale Grundlage industrieller Kraft- und Drehmomentsensoren, Wägezellen sowie Systeme zur Strukturüberwachung.
Für die messtechnische Auslegung ist insbesondere relevant, dass die Widerstandsänderung eines DMS sehr klein ausfällt. Daher wird ein DMS in der Regel nicht isoliert, sondern als Bestandteil einer Wheatstone-Brücke betrieben. Das Ausgangssignal einer Brücke liegt typischerweise im Bereich von 1mV/V bis 3mV/V bezogen auf die Speisespannung – ein Signalniveau, das eine geeignete Verstärker- und ADC-Auslegung erfordert.
Das vorliegende Dokument behandelt die physikalischen Grundlagen, die Signalentstehung in Brückenschaltungen sowie die Auswahl geeigneter Brückenkonfigurationen (Viertel-, Halb- und Vollbrücke). Darüber hinaus werden die Auslegung des Messkörpers, die Signalkette sowie das methodische Vorgehen bei der Entwicklung eines kundenspezifischen Kraftsensors dargestellt. Adressiert werden Ingenieurinnen und Ingenieure mit elektrotechnischen Grundkenntnissen, die DMS-basierte Kraftmessungen erstmals einsetzen oder einen kundenspezifischen Sensor gemeinsam mit einem Sensorhersteller entwickeln.
2 Technischer Hintergrund
2.1 Dehnmessstreifen:Zusammenhang zwischen Spannung, Dehnung und Widerstandsänderung
Ein Dehnmessstreifen besteht typischerweise aus einer dünnen metallischen Leiterstruktur, die auf einen Träger aufgebracht und auf das zu messende Bauteil geklebt wird. Wird das Bauteil mechanisch belastet, so erfährt es eine Dehnung ε, die auf den DMS übertragen wird.
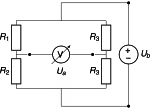
Schematische Darstellung der Stabverformung im unbelasteten Referenzzustand (Mitte), unter Druckbelastung (oben) und unter Zugbelastung (unten). Blaue Pfeile zeigen Stau- chung, rote Pfeile Dehnung; die Querrichtung entspricht dem Poisson-Effekt. Die gestrichelten Linien markieren die Ausgangsabmessungen; ∆l bezeichnet die Längenänderung unter Zugbelastung.
Die mechanische Dehnung ist definiert als:
\[ \varepsilon = \frac{\Delta l}{l_0} \tag{1} \]
wobei l0 die ursprüngliche Länge und ∆l die Längenänderung ist.
Über das Hooke’sche Gesetz besteht bei linear-elastischem Verhalten ein Zusammenhang zwischen Spannung σ und Dehnung:
\[ \sigma = \frac{F}{A} = E \cdot \varepsilon \tag{2} \]
mit dem Flächenquerschnitt A, der wirkenden Kraft F und dem Elastizitätsmodul E des Materials.
Durch die Dehnung verändert sich der elektrische Widerstand des DMS. Der Widerstand eines Leiters lautet:
\[ R = \rho \frac{l}{A} \tag{3} \]
mit dem spezifischen Widerstand ρ, der Leiterlänge lund der Querschnittsfläche A. Bei Dehnung ändern sich sowohl l als auch A sowie geringfügig ρ. Daraus resultiert eine relative Widerstandsänderung:
\[ \frac{\Delta R}{R} = k \cdot \varepsilon \tag{4} \]
Der Proportionalitätsfaktor k wird als K-Faktor (Gauge Factor) bezeichnet. Für metallische DMS liegt er typischerweise bei etwa k ≈2. Damit ergeben sich selbst bei technisch relevanten Dehnungen nur sehr kleine Widerstandsänderungen.
Zur Grössenordnung: Bei ε= 1000 µm/m = 10−3 und k= 2 gilt
\[ \frac{\Delta R}{R} = 2 \cdot 10^{-3} = 0{,}2\,\% \tag{5} \]
Ein DMS mit R= 120 Ω ändert seinen Widerstand dann nur um etwa ∆R= 0.24 Ω. Genau diese kleine Änderung muss robust gemessen werden.
2.2 Warum Brückenschaltungen?
Die direkte Messung solcher Widerstandsänderungen ist messtechnisch anspruchsvoll. Der absolute Widerstandsunterschied liegt häufig nur im Bereich von Milli-Ohm bis Zehntel-Ohm und damit in einer Grössenordnung, die leicht von parasitären Leitungs- und Kontaktwiderständen überdeckt wird. Gleichzeitig verändern Temperaturschwankungen den Leitwert von Sensor, Zuleitung und Elektronik, so dass scheinbare Dehnungsänderungen entstehen können, obwohl die mechanische Last konstant bleibt. Hinzu kommt, dass Instrumentenverstärker und ADCs selbst Offset, Drift und Rauschanteile einbringen. Ohne differenzielle Messmethode und geeignete Kompensation würde das Nutzsignal daher oft im Störanteil untergehen. Kritisch sind vor allem:
- sehr kleine relative Änderungen (10−4 bis 10−3),
- Leitungs- und Kontaktwiderstände,
- Temperatureinflüsse,
- Drift und Offset von Messverstärkern.
Eine effektive Lösung ist die Wheatstone-Brücke. Sie besteht aus zwei Spannungsteilern, die differentiell ausgewertet werden. Vier Widerstände werden als Brücke verschaltet und mit einer Speisespannung UB versorgt; die Messgrösse ist die Brückenausgangsspannung UA.
Im abgeglichenen Zustand gilt:
\[ \frac{R_1}{R_2} = \frac{R_3}{R_4} \quad \Rightarrow \quad U_A = 0 \tag{6} \]
Bereits kleine Änderungen eines oder mehrerer Brückenwiderstände verschieben das Verhältnis der Teiler und erzeugen eine messbare Differenzspannung UA. Für kleine Änderungen und eine symmetrisch abgeglichene Brücke ist UA näherungsweise proportional zu ∆R/R und damit direkt proportional zur Dehnung ε.
(a) Viertelbrücke
(b) Halbbrücke TypA: Zwei DMS im selben Brückenarm (z.B. Ober- und Unterseite eines Biegebalkens). Die gegensinnigen Dehnungen addieren sich im Ausgangssignal.
(c) Halbbrücke TypB: Zwei DMS in gegenüberliegenden Brückenarmen (z.B. Längs-DMS R1 und Quer-DMS R4 im Zugstab). Wirksam zur Querempfindlichkeitskompensation über den Poisson Effekt.
(d) Vollbrücke: Alle vier Brückenarme mit aktiven DMS bestückt. Maximale Empfindlichkeit und beste Unterdrückung gemeinsamer Störeinflüsse.
Ändert sich nun einer oder mehrere Widerstände durch Dehnung, entsteht eine differenzielle Ausgangsspannung UA. Diese wird typischerweise mit einem Instrumentenverstärker verstärkt und anschliessend digitalisiert. Vorteile der Brückenschaltung sind:
- hohe Empfindlichkeit gegenüber kleinen Widerstandsänderungen,
- gute Unterdrückung von Störgrössen (Common Mode),
- Möglichkeit zur Temperatur- und Biegekompensation,
- direkte Umsetzung der Dehnung in eine proportionale Spannung.
2.3 Brückenkonfigurationen im Vergleich
Die Wahl der Brückenkonfiguration ist immer ein Kompromiss zwischen Aufwand, Empfindlichkeit und Robustheit. Als Faustregel gilt: Je mehr aktive DMS in der Brücke arbeiten, desto grösser ist das Nutzsignal und desto besser ist die Kompensation gemeinsamer Störeinflüsse.
2.4 Viertelbrücke
Bei der Viertelbrücke wird nur ein aktiver DMS in die Brücke integriert, während die drei anderen Widerstände Referenzwiderstände sind.
Eigenschaften
- geringster Installationsaufwand,
- kleinste Ausgangsspannung aller Konfigurationen,
- empfindlich gegenüber Temperaturänderungen,
- Leitungswiderstände können Messfehler verursachen.
Die Brückenausgangsspannung ist für kleine Dehnungen näherungsweise:
\[ U_A \approx \frac{U_B \cdot k \cdot \varepsilon}{4} \tag{7} \]
Typische Anwendungen
Viertelbrücken werden häufig bei einfachen Dehnungsmessungen, Prototypen und nachträglicher Instrumentierung eingesetzt. Durch temperaturangepasste DMS-Trägerwerkstoffe, 3-Leiter-Technik oder Dummy-DMS lässt sich die Temperaturabhängigkeit reduzieren.
Rechenbeispiel (Dehnung → Signal)
Für ein konsistentes Beispiel seien gegeben: Speisespannung \(U_B = 5\,\mathrm{V}\), K-Faktor \(k = 2\) und Dehnung \(\varepsilon = 500\,\mu\varepsilon = 5 \cdot 10^{-4}\). Dann ergibt sich für die Viertelbrücke:
\[ \begin{aligned} \frac{\Delta R}{R} &= k \varepsilon = 2 \cdot 5 \cdot 10^{-4} = 10^{-3} \\ U_A &\approx \frac{U_B \cdot k \cdot \varepsilon}{4} = \frac{5}{4} \cdot 10^{-3}\,\mathrm{V} = 1.25\,\mathrm{mV} \end{aligned} \tag{8} \]
Bei Zugdehnung ist das Vorzeichen von \(U_A\) positiv, bei Druckdehnung negativ (abhängig von DMS-Orientierung und Messpolung).
2.5 Halbbrücke
In der Halbbrücke werden zwei aktive DMS verwendet. Diese können so angeordnet werden, dass sie unterschiedliche mechanische Effekte erfassen. Die Brückenausgangsspannung ist für kleine Dehnungen näherungsweise:
\[ U_A \approx \frac{U_B \cdot k \cdot \varepsilon}{2} \tag{9} \]
Biegekompensation
Bei Biegebelastung entsteht auf einer Seite Zugdehnung und auf der gegenüberliegenden Seite Druckdehnung. Werden zwei DMS gegenüberliegend angebracht und in die Brücke integriert, ergibt sich:
- Verdopplung der Empfindlichkeit,
- Unterdrückung von Temperatureinflüssen,
- Kompensation axialer Dehnungen.
Einachsiger Spannungszustand
Werden zwei DMS in Längs- und Querrichtung (Poisson-Dehnung) eingesetzt, kann ein einachsiger Spannungszustand gezielter ausgewertet werden. Dadurch lassen sich Querempfindlichkeiten reduzieren und Messwerte besser interpretieren.
Rechenbeispiel (Dehnung → Signal)
Unter Verwendung derselben Randbedingungen (\(U_B = 5\,\mathrm{V}\), \(k = 2\), \(\varepsilon = 500\,\mu\varepsilon\)) folgt für die Halbbrücke:
\[ U_A \approx \frac{U_B \cdot k \cdot \varepsilon}{2} = \frac{5}{2} \cdot 10^{-3}\,\mathrm{V} = 2.5\,\mathrm{mV} \tag{10} \]
Damit beträgt die Signalamplitude bei identischer Dehnung idealisiert den doppelten Wert der Viertelbrücke.
2.6 Vollbrücke
Die Vollbrücke nutzt vier aktive DMS. Sie stellt die messtechnisch leistungsfähigste Konfiguration dar.
Vorteile
- maximale Ausgangsspannung (höchste Empfindlichkeit),
- sehr gute Temperaturkompensation,
- Kompensation von Biege- oder Torsionseinflüssen je nach Anordnung,
- hohe Signal-Rausch-Abstände.
Für kleine Dehnungen ergibt sich näherungsweise:
\[ U_A \approx U_B \cdot k \cdot \varepsilon \tag{11} \]
Damit ist die Empfindlichkeit etwa viermal höher als bei der Viertelbrücke.
Typische Anwendungen
- Kraftaufnehmer,
- Wägezellen,
- Drehmomentmesswellen,
- hochpräzise Strukturüberwachung.
Durch geeignete Positionierung der DMS können gezielt einachsige Spannungszustände erfasst oder Störgrössen wie Temperaturgradienten und parasitäre Biegemomente minimiert werden.
Rechenbeispiel (Dehnung → Signal)
Für die Vollbrücke mit den gleichen Annahmen (\(U_B = 5\,\mathrm{V}\), \(k = 2\), \(\varepsilon = 500\,\mu\varepsilon\)) ergibt sich:
\[ U_A \approx U_B \cdot k \cdot \varepsilon = 5 \cdot 10^{-3}\,\mathrm{V} = 5.0\,\mathrm{mV} \tag{12} \]
Die Vollbrücke liefert damit bei gleicher Dehnung idealisiert die vierfache Signalamplitude gegenüber der Viertelbrücke.
2.7 Nennkennwert und mV/V-Signal
In der industriellen Messtechnik wird das Ausgangssignal von Kraft-, Druck- und Drehmomentsensoren üblicherweise normiert auf die Speisespannung angegeben. Der Nennkennwert \(C\) beschreibt das Verhältnis von Brückenausgangsspannung zu Speisespannung bei Nennlast:
\[ C = \left.\frac{U_A}{U_B}\right|_{F = F_\mathrm{Nenn}}\quad \frac{\mathrm{mV}}{\mathrm{V}} \tag{13} \]
Typische Nennkennwerte liegen bei \(C = 1\,\mathrm{mV/V}\) bis \(C = 3\,\mathrm{mV/V}\) für Kraft- und Drucksensoren in Vollbrückenkonfiguration.
Bedeutung für die Systemauslegung
Die mV/V-Normierung ermöglicht:
- den Vergleich von Sensoren unabhängig von der Betriebsspannung,
- die einfache Berechnung des Ausgangssignals: \(U_A = C \cdot U_B\),
- die Auslegung des nachgeschalteten Verstärkers: \(G \ge U_{\mathrm{ADC,FS}} / (C \cdot U_B)\).
Zusammenhang mit der Brückenformel
Aus der Vollbrückenformel folgt direkt:
\[ C = \frac{U_A}{U_B} = k \cdot \varepsilon_\mathrm{Nenn} \tag{14} \]
Bei \(k = 2\) und \(C = 2\,\mathrm{mV/V}\) ergibt sich eine Nenndehnung von \(\varepsilon_\mathrm{Nenn} = 1000\,\mu\varepsilon\). Die mechanische Auslegung des Messkörpers zielt darauf ab, bei Nennlast genau diese Dehnung an den DMS-Applikationsstellen zu erzeugen.
2.8 Genauigkeit und Messunsicherheit
Die erreichbare Messgenauigkeit einer DMS-Messanordnung wird durch mehrere überlagerte Fehlerbeiträge bestimmt. Grundsätzlich unterscheidet man systematische Abweichungen (Bias), die durch Kalibrierung korrigiert werden können, von zufälligen Abweichungen (Rauschen, Drift), die die Auflösungsgrenze des Systems bestimmen.
Relevante Fehlerbeiträge in der DMS-Messkette sind:
- K-Faktor-Toleranz: Der K-Faktor eines metallischen DMS ist fertigungsbedingt mit einer Toleranz von typischerweise ±0,5 % bis ±1 % behaftet.
- Temperaturkoeffizient des Widerstands (TKW): Metallische DMS besitzen einen temperaturabhängigen spezifischen Widerstand \(\rho(T)\). Ohne Kompensation entsteht ein scheinbarer Dehnungsanteil, der bei Konstantan-Legierungen in der Grössenordnung von einigen \(\mu\varepsilon/\mathrm{K}\) liegt.
- Kriechverhalten und Hysterese: Klebstoff und Träger weisen viskoelastisches Verhalten auf, das bei dynamischen Messungen und nach grossen Lastwechseln zu Nachlauffehlern führt.
- Verstärker-Offset und -Drift: Der Eingangsoffset eines Instrumentenverstärkers addiert sich direkt zum Brückensignal und wird durch Temperaturdrift zusätzlich beeinflusst.
Die Gesamtmessunsicherheit \(u_\mathrm{ges}\) wird nach dem Gauss’schen Fehlerfortpflanzungsgesetz aus den Einzelbeiträgen zusammengesetzt:
\[ u_\mathrm{ges} = \sqrt{\sum_i u_i^2} \tag{15} \]
Für eine fundierte Messunsicherheitsanalyse ist die Norm ISO GUM (Guide to the Expression of Uncertainty in Measurement) massgebend.
2.9 Auflösung der Signalkette
Die effektive Auflösung der DMS-Messkette wird durch das schwächste Glied in der Signalkette begrenzt. Zu berücksichtigen sind:
Analogsignal und Verstärker
Das Brückensignal liegt bei typischen Anwendungen im Bereich von wenigen mV. Ein Instrumentenverstärker mit einstellbarem Verstärkungsfaktor \(G\) skaliert das Signal auf den Eingangsbereich des Analog-Digital-Wandlers (ADC):
\[ U_\mathrm{ADC} = G \cdot U_A = G \cdot c \cdot U_B \cdot k \cdot \varepsilon \tag{16} \]
ADC-Auflösung
Ein ADC mit \(n\) Bit und Eingangsbereich \(U_\mathrm{FS}\) besitzt eine theoretische Spannungsauflösung (1 LSB) von:
\[ \Delta U_\mathrm{LSB} = \frac{U_\mathrm{FS}}{2^n} \tag{17} \]
Die kleinste noch auflösbare Dehnung ergibt sich damit zu:
\[ \varepsilon_\mathrm{min} = \frac{\Delta U_\mathrm{LSB}}{G \cdot c \cdot U_B \cdot k} \tag{18} \]
Beispiel
Für eine Viertelbrücke (\(c = 1/4\)), \(U_B = 5\,\mathrm{V}\), \(k = 2\), \(G = 100\), 16-bit-ADC mit \(U_\mathrm{FS} = 3.3\,\mathrm{V}\):
\[ \Delta U_\mathrm{LSB} = \frac{3{,}3}{65536} \approx 50\,\mu\mathrm{V} \Rightarrow \varepsilon_\mathrm{min} \approx \frac{50 \cdot 10^{-6}}{100 \cdot 0{,}25 \cdot 5 \cdot 2} = 0.2\,\mu\varepsilon \tag{19} \]
In der Praxis reduziert Rauschen (thermisches Rauschen, Quantisierungsrauschen, Verstärkerrauschen) die effektive Auflösung auf typischerweise \(1\,\mu\varepsilon\) bis \(5\,\mu\varepsilon\) für gut ausgelegte industrielle Messverstärker.
2.10 Vierleitertechnik (Kelvin-Messung)
Bei der Standardverdrahtung eines DMS in Zweileiter-Technik fliessen Mess- und Speisestrom über dieselben Leitungen. Die parasitären Leitungswiderstände \(R_L\) gehen damit direkt in die Brückenbalance ein und täuschen eine Dehnung vor:
\[ \Delta U_{A,\mathrm{Leitung}} \approx \frac{U_B}{4} \cdot \frac{2 R_L}{R + 2 R_L} \tag{20} \]
Bei einem DMS mit \(R = 120\,\Omega\) und einem Leitungswiderstand von \(R_L = 1\,\Omega\) pro Leitung entspricht dies bereits einem scheinbaren Dehnungsfehler von mehreren hundert \(\mu\varepsilon\).
Dreileiter-Technik
Eine einfache Massnahme ist die Dreileiter-Schaltung: Eine dritte Leitung führt von der Brückenmitte zurück zur Messeinheit. Der dadurch kompensierte Leitungswiderstand reduziert den Fehler erheblich, setzt jedoch einen symmetrischen Leitungsaufbau voraus.
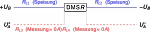
Vierleiter-Technik (Kelvin)
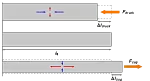
Die präziseste Lösung ist die Vierleiter-Technik: Speisung und Spannungsabgriff werden über getrennte Leitungspaare geführt. Da über die Spannungsmesspfade nahezu kein Strom fliesst (hochohmiger Eingang des Instrumentenverstärkers), fallen an den Zuleitungswiderständen praktisch keine Spannungsabfälle ab, die das Messergebnis verfälschen könnten.
Abbildung 3: Prinzip der Vierleiter-Technik (Kelvin-Messung): Speiseleitungen (blau) und Messleitungen (rot gestrichelt) sind getrennt. Da über die Messleitungen kein Strom fliesst, heben sich Leitungswiderstände \(R_{L3}\), \(R_{L4}\) nicht vom Messergebnis ab.
2.11 Sechsleitertechnik im Zusammenspiel mit Vollbrücken
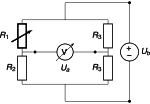
Bei hochgenauen Vollbrückensensoren wird häufig die Sechsleitertechnik eingesetzt. Neben den beiden Speiseleitungen und den beiden Messleitungen kommen zwei zusätzliche Sense-Leitungen hinzu, die direkt an den Brückenklemmen angeschlossen sind. Die Auswerteelektronik erfasst damit die tatsächlich am Sensor anliegende Speisespannung und regelt diese auf den Sollwert nach.
Der wesentliche Vorteil gegenüber der Vierleitertechnik besteht darin, dass nicht nur der Einfluss der Messleitungsströme minimiert wird, sondern auch Spannungsabfälle auf den Speiseleitungen \(R_{L+}\) und \(R_{L-}\) aktiv kompensiert werden. Das ist insbesondere bei langen Kabelwegen, wechselnder Temperatur oder dynamischer Stromaufnahme relevant.
Für den normierten Ausgang gilt weiterhin:
\[ \frac{U_A}{U_{B,\mathrm{Sensor}}} = C \tag{21} \]
Mit Sense-Rückführung wird sichergestellt, dass \(U_{B,\mathrm{Sensor}}\) konstant bleibt, auch wenn die am Verstärker ausgegebene Speisespannung \(U_{B,\mathrm{Quelle}}\) aufgrund von Leitungsabfällen höher gewählt werden muss. Damit verbessert sich die Reproduzierbarkeit der Kennlinie einer Vollbrücke über Kabellänge und Umgebungsbedingungen hinweg.
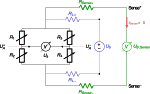
Abbildung 4: Sechsleitertechnik an einer Vollbrücke: Zusätzliche Sense-Leitungen erfassen die tatsächliche Speisespannung direkt am Sensor. Dadurch werden Leitungsabfälle der Speiseadern kompensiert und der Kennwert in mV/V bleibt auch bei langen Kabeln stabil.
2.12 Signal-Rausch-Verhältnis und Common-Mode-Rejection
Signal-Rausch-Verhältnis (SNR)
Das SNR beschreibt das Verhältnis von Nutzsignal zu überlagerten Rausch- und Störanteilen. Für DMS-Messanordnungen gilt:
\[ \mathrm{SNR} = 20 \log_{10}\left(\frac{U_A}{U_\mathrm{Rauschen}}\right)\,[\mathrm{dB}] \tag{22} \]
Da \(U_A\) mit steigender Anzahl aktiver DMS-Arme wächst (Faktor 1, 2 oder 4 für Viertel-, Halb- und Vollbrücke), verbessert sich das SNR der Vollbrücke gegenüber der Viertelbrücke theoretisch um bis zu \(20 \log_{10}(4) \approx 12\,\mathrm{dB}\). Dies ist ein zentrales Argument für die Vollbrücke in rauschkritischen Anwendungen.
Common-Mode-Rejection (CMR)
Störsignale, die auf beide Eingänge des Instrumentenverstärkers gleich einwirken (z. B. eingekoppelte Netzbrumm- oder HF-Störungen), werden als Gleichtaktsignal bezeichnet. Der Instrumentenverstärker unterdrückt diese mit seiner Common-Mode-Rejection Ratio (CMRR):
\[ \mathrm{CMRR} = 20 \log_{10}\left(\frac{A_\mathrm{diff}}{A_\mathrm{cm}}\right)\,[\mathrm{dB}] \tag{23} \]
Hochwertige Instrumentenverstärker erreichen CMRR-Werte von 100 dB bis 120 dB. Ein DMS in Brückenschaltung profitiert auf zwei Ebenen von der CMR:
- Die Wheatstone-Brücke selbst unterdrückt gemeinsame Speisespannungsschwankungen, da sich diese auf beide Brückenzweige gleich auswirken.
- Der nachgeschaltete Instrumentenverstärker unterdrückt kapazitiv oder induktiv eingekoppelte Gleichtaktstörungen aus der Umgebung.
Praxishinweis
Twisted-Pair-Kabel (verdrillte Leitungen), eine durchgängige Schirmung gegen kapazitive Einkopplung sowie ein definierter Schutzleiteranschluss (Shield-Ground) sind wirksame Massnahmen zur Maximierung der effektiven CMR in industriellen Umgebungen.
2.13 Messkörperauslegung und mechanische Integration
Das Bindeglied zwischen der zu messenden Kraft und dem elektrischen DMS-Signal ist der Messkörper (auch: Federkörper). Er wandelt die anliegende Kraft in eine reproduzierbare, gut messbare mechanische Dehnung an definierten Stellen um. Die Auslegung des Messkörpers ist bei der Entwicklung kundenspezifischer Kraftsensoren ein zentraler Schritt.
Typische Messkörpergeometrien
- Biegebalken: Einfache Fertigung, hohe Empfindlichkeit; ideal für kleine bis mittlere Kräfte. DMS werden auf den Oberflächen maximaler Zug- und Druckdehnung appliziert; begünstigt Halb- oder Vollbrücke.
- Zugstab / Druckstab: Näherungsweise homogene Dehnungsverteilung über den Querschnitt; gut geeignet für einachsige Kraft. Typisch für Wägezellen und Zugsensoren mittlerer bis hoher Nennlast.
- Schubsteg (Shear Beam): Messung der Schubdehnung unter 45; robust gegenüber Querkräften und parasitären Momenten. Häufig in industriellen Kraftmessdosen.
- Membran / Rohrfeder: Typisch in Druck- und Drehmomentsensoren.
Auslegungsziel und Nennkennwert
Das Ziel der mechanischen Auslegung ist es, bei Nennlast \(F_\mathrm{Nenn}\) eine Dehnung im Bereich von \(\varepsilon_\mathrm{Nenn} \approx 500\,\mu\varepsilon\) bis \(1500\,\mu\varepsilon\) an den DMS-Applikationsstellen zu erzielen. Damit ergibt sich bei Vollbrücke (\(k = 2\)) ein Nennkennwert von \(C = k \cdot \varepsilon_\mathrm{Nenn} = 1\,\mathrm{mV/V}\) bis \(3\,\mathrm{mV/V}\) (vgl. Abschnitt 2.7).
Zu geringe Dehnung führt zu kleinem Nutzsignal und schlechterem SNR; zu grosse Dehnung nähert sich der Streckgrenze des Werkstoffs an, was Linearität und Langzeitstabilität beeinträchtigt.
Werkstoffwahl
- Aluminium (z. B. Al 7075-T6): Leicht, einfach zu bearbeiten; geeignet für geringe bis mittlere Lasten ohne hohe Dauerbelastung (Kriechneigung beachten).
- Stahl (z. B. 1.4542 (17-4PH), 1.7225): Höhere Festigkeit, gut für dynamische und Dauerlastanwendungen; aufwendiger zu bearbeiten.
- Titan: Gute Festigkeit bei geringem Gewicht; teuer, selten ausserhalb von Luft- und Raumfahrtanwendungen.
2.14 Auswahlhilfe für die Praxis
In der Praxis hat sich eine einfache Entscheidungslogik bewährt:
- Viertelbrücke: sinnvoll bei geringem Aufwand, wenn moderate Genauigkeit ausreicht.
- Halbbrücke: guter Standard für viele Strukturmessungen, insbesondere bei Biegung.
- Vollbrücke: beste Wahl bei hohen Anforderungen an Signalqualität und Langzeitstabilität.
Die Wahl der Brücke allein genügt nicht. Messqualität hängt zusätzlich von der DMS-Applikation (Klebstoff, Ausrichtung, Oberflächenvorbereitung), der Kabelführung, der Speisestabilität und der Verstärker-/ADC-Auslegung ab.
3 Typische Fragestellungen
In Entwicklungs- und Validierungsprojekten treten bei DMS-Messaufgaben häufig wiederkehrende Fragestellungen auf. Typische Beispiele sind:
- Welche Brückenkonfiguration (Viertel-, Halb- oder Vollbrücke) ist für den vorliegenden Lastfall geeignet?
- Welche Signalhöhe ist bei gegebener Dehnung, Speisespannung und K-Faktor zu erwarten?
- Wie stark beeinflussen Temperaturänderungen und Leitungswiderstände die Messunsicherheit?
- Welche DMS-Orientierung ist für Zug-, Druck-, Biege- oder Torsionsbeanspruchung erforderlich?
- Welche Anforderungen ergeben sich an Instrumentenverstärker, ADC-Auflösung und Filterung?
- Wie kann zwischen Aufwand (Applikation/Verdrahtung) und erreichbarer Messqualität sinnvoll abgewogen werden?
4 Häufige Fehlerquellen
Unplausible Messwerte entstehen in der Praxis häufig nicht durch das DMS-Prinzip selbst, sondern durch Applikations- und Integrationsfehler. Relevante Fehlerquellen sind insbesondere:
- unzureichende Oberflächenvorbereitung vor der DMS-Applikation,
- fehlerhafte Ausrichtung des DMS relativ zur Hauptdehnungsrichtung,
- thermisch ungünstige Positionierung oder fehlende Temperaturkompensation,
- nicht berücksichtigte Leitungs- und Übergangswiderstände,
- mechanische Nebeneffekte (z. B. Querkräfte, parasitäre Biegung, lokale Spannungsspitzen),
- unzureichende Schirmung, Masseführung oder Verstärkerdimensionierung in der Signalkette.
5 Zusammenfassung/Fazit
Dehnmessstreifen ermöglichen die präzise Erfassung mechanischer Dehnungen über sehr kleine Widerstandsänderungen. Aufgrund der geringen Signalhöhe ist der Einsatz von Wheatstone-Brücken in der Praxis in der Regel erforderlich.
Die Wahl zwischen Viertel-, Halb- und Vollbrücke stellt eine systematische Abwägung zwischen Installationsaufwand, Kosten und Messqualität dar. Viertelbrücken sind einfach und kostengünstig, Halbbrücken bieten bereits deutlich verbesserte Kompensationseigenschaften, und Vollbrücken liefern das höchste Nutzsignal bei zugleich bestmöglicher Unterdrückung typischer Störeinflüsse.
Für belastbare Messdaten sind die mechanische Einbausituation und die elektrische Signalkette gleichermassen entscheidend. Bei konsistenter Auslegung beider Domänen stellen DMS-Brücken eine robuste und hochauflösende Messtechnik für Labor- und Industrieanwendungen dar.
Die folgenden Tabellen fassen zentrale Vergleichsgrössen in qualitativer und quantitativer Form zusammen.
Tabelle 1: Qualitativer Vergleich zentraler Auslegungskriterien
| Parameter | 1/4-Brücke | 1/2-Brücke | Vollbrücke |
|---|---|---|---|
| Aktive DMS in der Brücke |
1 |
2 |
4 |
| Verdrahtungsaufwand / Kosten |
Gering |
Gering-Mittel |
Mittel-Hoch |
| Empfindlichkeit (relativ) |
Gering |
Mittel |
Hoch |
| Temperaturkompensation |
Gering bis mittela |
Gut |
Sehr gut |
| Einfluss von Leitungswiderständen |
Hoch |
Mittel |
Niedrig |
| Robustheit gegen parasitäre Dehnungen |
Gering |
Mittel |
Hoch |
1/4-Brücke
- Aktive DMS in der Brücke
-
1
- Verdrahtungsaufwand / Kosten
-
Gering
- Empfindlichkeit (relativ)
-
Gering
- Temperaturkompensation
-
Gering bis mittela
- Einfluss von Leitungswiderständen
-
Hoch
- Robustheit gegen parasitäre Dehnungen
-
Gering
1/2-Brücke
- Aktive DMS in der Brücke
-
2
- Verdrahtungsaufwand / Kosten
-
Gering-Mittel
- Empfindlichkeit (relativ)
-
Mittel
- Temperaturkompensation
-
Gut
- Einfluss von Leitungswiderständen
-
Mittel
- Robustheit gegen parasitäre Dehnungen
-
Mittel
Vollbrücke
- Aktive DMS in der Brücke
-
4
- Verdrahtungsaufwand / Kosten
-
Mittel-Hoch
- Empfindlichkeit (relativ)
-
Hoch
- Temperaturkompensation
-
Sehr gut
- Einfluss von Leitungswiderständen
-
Niedrig
- Robustheit gegen parasitäre Dehnungen
-
Hoch
Tabelle 2: Quantitativer Vergleich bei \(U_B = 5\,\mathrm{V}\), \(k = 2\), \(\varepsilon = 500\,\mu\varepsilon\)
| Parameter | 1/4-Brücke | 1/2-Brücke | Vollbrücke |
|---|---|---|---|
| Normierter Faktor in UA = c UB k ε |
\(c = 1/4\) |
\(c = 1/2\) |
\(c = 1\) |
| Brückenausgangsspannung UA |
\(1.25\,\mathrm{mV}\) |
\(2.5\,\mathrm{mV}\) |
\(5.0\,\mathrm{mV}\) |
| Signalgewinn relativ zur Viertelbrücke |
1 |
2 |
4 |
1/4-Brücke
- Normierter Faktor in UA = c UB k ε
-
\(c = 1/4\)
- Brückenausgangsspannung UA
-
\(1.25\,\mathrm{mV}\)
- Signalgewinn relativ zur Viertelbrücke
-
1
1/2-Brücke
- Normierter Faktor in UA = c UB k ε
-
\(c = 1/2\)
- Brückenausgangsspannung UA
-
\(2.5\,\mathrm{mV}\)
- Signalgewinn relativ zur Viertelbrücke
-
2
Vollbrücke
- Normierter Faktor in UA = c UB k ε
-
\(c = 1\)
- Brückenausgangsspannung UA
-
\(5.0\,\mathrm{mV}\)
- Signalgewinn relativ zur Viertelbrücke
-
4
a Mit Dummy-DMS, temperaturangepasstem Trägerwerkstoff und geeigneter Leitungsführung.
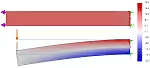
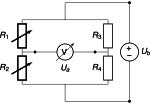
Abbildung 5: Vergleich typischer Lastfälle: Zugstab (oben) und Biegebalken (unten)
Im einachsig belasteten Zugstab (oberes Bild) liegt über den Querschnitt näherungsweise ein homogener Spannungs- und Dehnungszustand vor. Für diese Situation kann eine Viertelbrücke ausreichend sein, da bereits ein einzelner in Belastungsrichtung orientierter DMS ein proportionales Signal liefert. Der Verdrahtungsaufwand ist minimal, die Signalausbeute jedoch begrenzt, und Temperatureinflüsse wirken stärker auf das Ergebnis. Mit einer Halbbrücke (zweiter gleich belasteter oder kompensierender DMS) steigen die Empfindlichkeit und die Temperaturstabilität. Eine Vollbrücke stellt in diesem Lastfall die präziseste, jedoch auch aufwendigste Lösung dar.
Beim Biegebalken (unteres Bild) liegt ein Dehnungsgradient über die Balkenhöhe vor: eine Seite auf Zug, die andere auf Druck. Damit stellt die Halbbrücke in vielen Anwendungen eine ausgewogene Lösung dar. Zwei DMS auf gegenüberliegenden Faserlagen liefern gegensinnige Widerstandsänderungen, die sich im Ausgangssignal addieren. Dies erhöht die Empfindlichkeit gegenüber der Viertelbrücke deutlich und kompensiert gemeinsame Temperatureinflüsse weitgehend. Eine Vollbrücke mit vier aktiv belasteten DMS erzielt die höchste Signalamplitude und beste Störunterdrückung, erfordert jedoch eine deutlich präzisere Applikation sowie höheren Verdrahtungsaufwand.